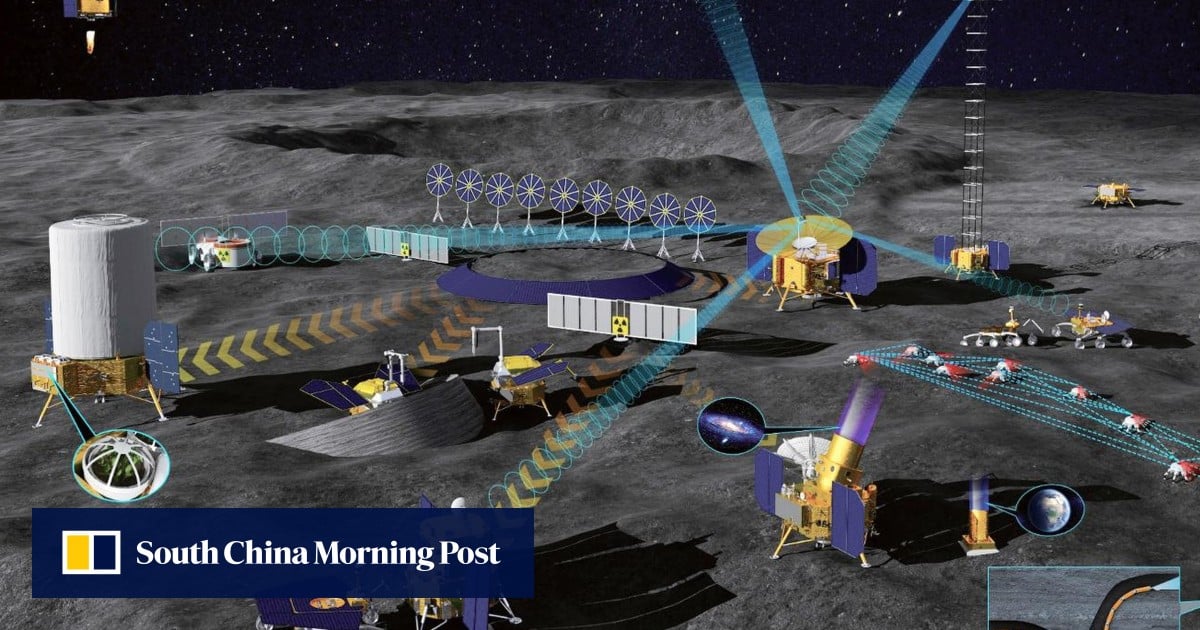
Highly dexterous robot built on a wheeled platform will traverse the lunar surface while performing construction, maintenance and sampling
2-MIN READ2-MIN ListenLing Xinin OhioPublished: 8:00pm, 14 Mar 2026Chinese researchers have proposed a semi-humanoid robot mounted on a wheeled platform as part of key infrastructure for the country’s lunar research station slated to take shape by 2035.Combining mobility with humanlike dexterity, the robot is designed to move across the lunar surface while carrying out delicate operations, from construction and maintenance to scientific experiments, sampling and analysis, according to researchers from the Beijing Institute of Spacecraft System Engineering.Its waist can rotate about 180 degrees in either direction and bend forward up to 90 degrees, while its nimble hand has four degrees of freedom, allowing it to perform precise manipulation, the team reported in the Journal of Deep Space Exploration in December.
“Compared with bipedal walking, a wheeled active suspension moves faster and is more stable, providing a steady platform for work by the upper body,” the researchers wrote. “China’s Yutu lunar rovers and Zhurong Mars rover have both used wheeled locomotion.”
Humanoid or semi-humanoid robots have long been explored for space operations. Robonaut, jointly developed by Nasa and General Motors, became the first humanoid robot deployed in space when it was sent to the International Space Station in 2011.